NASA CanSat Competition
- January 2017 - June 2017
- www.cansatcompetition.com
Overview
Led a 6 member team to develop a payload to sample atmosphere and map ground during flight.
Responsible for flight software development in C++ and GUI for sensor telemetry (Arduino, Processing IDE).
Selected in top 30 finalists to launch system from 90+ teams around the world.
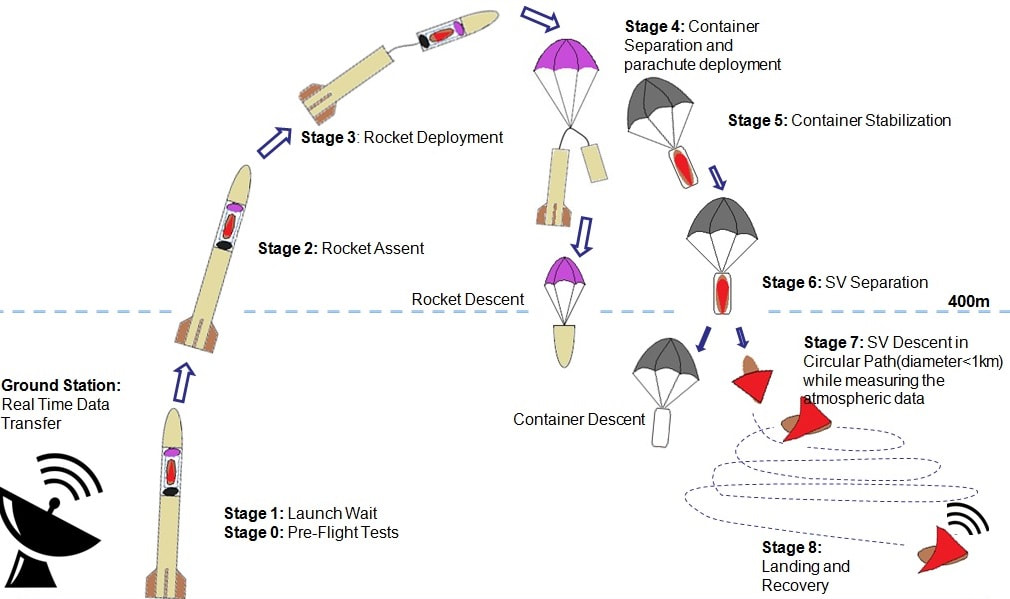
The mission objectives included designing a sensor payload which could sample the atmospheric composition while traveling through a planetary atmosphere during flight.
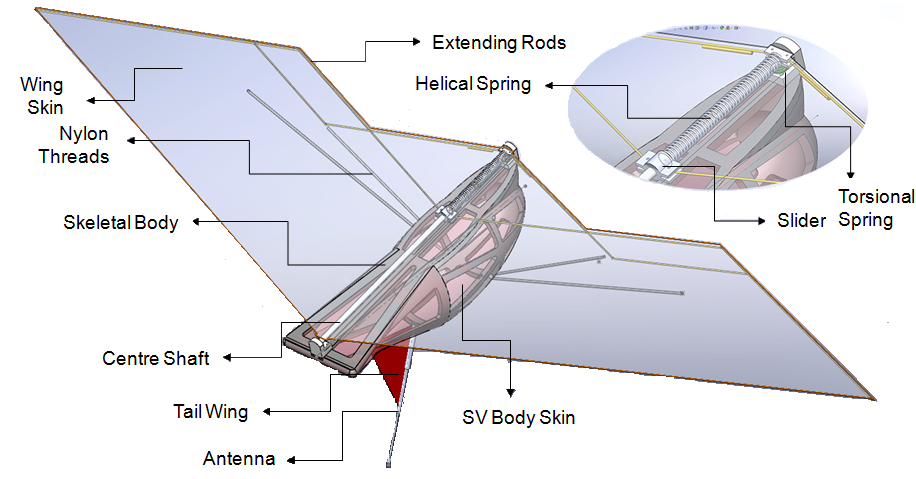
The system was composed of two primary components, a science vehicle (SV) and a re-entry container that protects the vehicle during ascent, "near-apogee" deployment and initial re-entry/descent.
The SV separated from the container at an altitude of 400 m and autonomously glided in a controlled circular pattern.While gliding, it sampled and transmitted data at a rate of 1 sample per second to a ground station.
GPS was present to transmit the real-time position and velocity. The vehicle also incorporated a pitot tube to measure the speed independent of GPS.
Imaging was initiated on a command sent from the ground station to the glider science vehicle. All data related to separation, wing actuation, location and sensors was also recorded onboard as a back-up for retrieval after the landing.