Fly-By-Feel Autonomous Vehicles
- May 2017 - August 2017
- https://sacl.stanford.edu/research/state-estimation
Overview
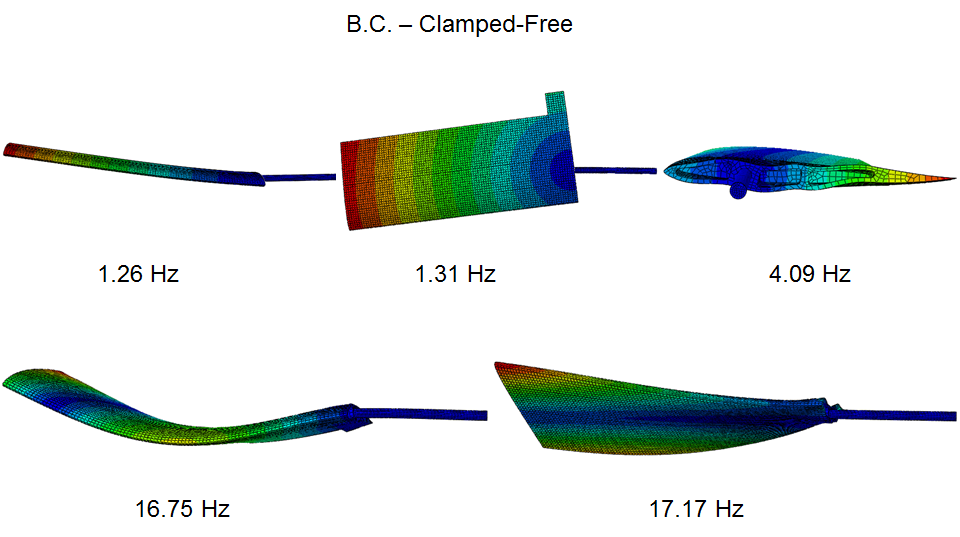
Collaborated to develop a framework in C++ to predict the response
of bio-inspired smart wing for "Fly-By-Feel" autonomous vehicles
under different flight conditions and loads. Optimized the model
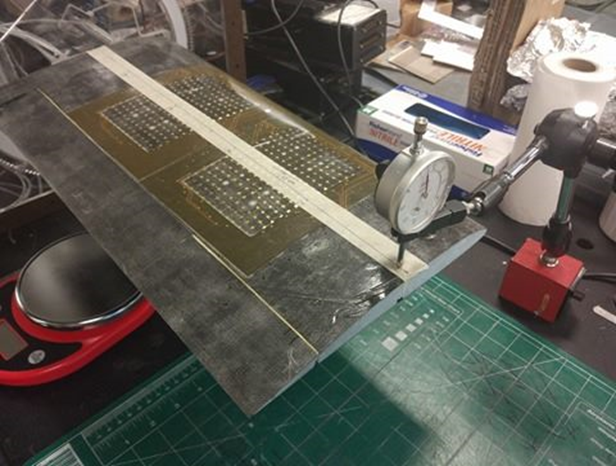
by operating on data collected from sensors during wind tunnel
experiments and achieved a 98% prognostic accuracy using Finite
Element Analysis in ABAQUS.
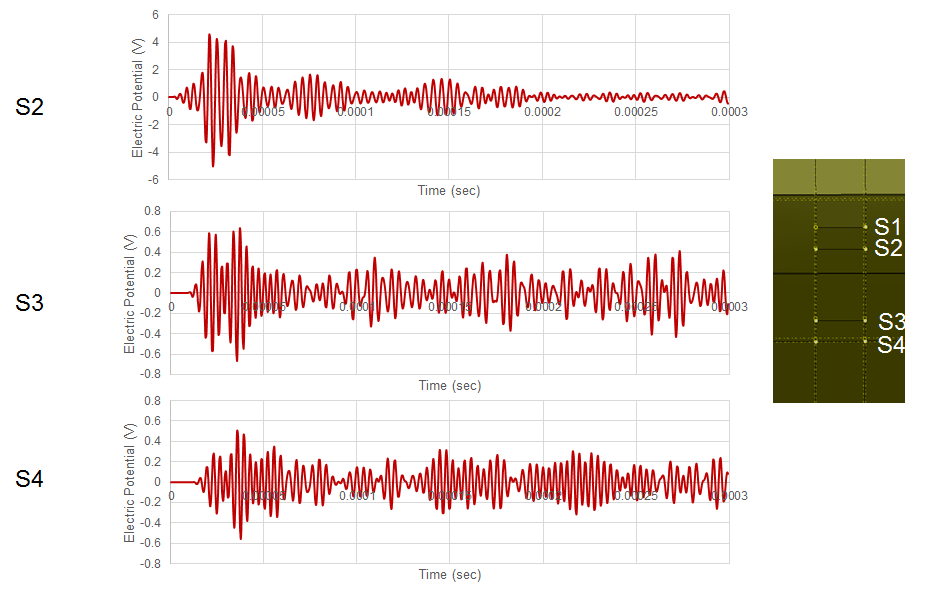
Flight state estimation framework, named fly-by-feel, leverages
the high-dimensionality and multimodality properties of sensor
network data. The i-FlyNet model architecture, which acts as the
backbone classifier of this framework, is built as a combination
of conventional signal processing and modern deep learning
techniques to make the richest possible inference from this unique
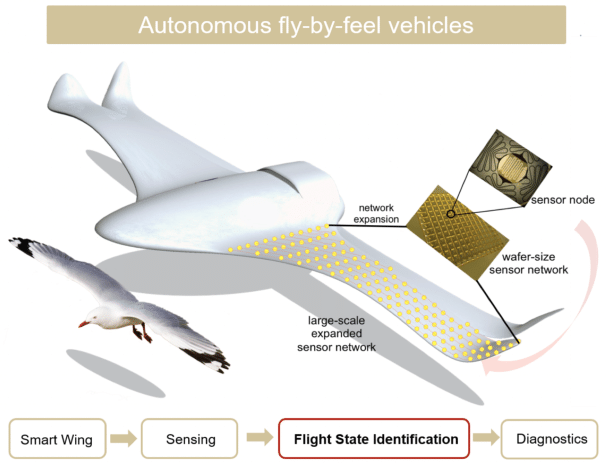
sensory data. SACL’s fly-by-feel powered morphing wing not only
excels at predicting stall for safe flight, it also estimates the
wing shape and angle of attack that will achieve the maximum
flight efficiency.